



CMUcam v4 SPARKFUN (DEV-10032)
Bilgisayarlı görüş gerçekten harika bir teknolojidir ancak çok fazla işlem gücü gerektirir, bir sonraki mikroişlemci projenize hareket ve rengi tanımlama gücü vermek güzel olurdu ancak Arduino gibi bir şey buna ayak uydurmakta zorlanırdı. Yapabileceğiniz şey, ağır işleri özel bir işlemciye yaptırmak ve ardından bu verileri Arduino'ya iletmektir ve CMUcam4 tam olarak bunu yapar. CMUcam4 tamamen programlanabilir gömülü bir bilgisayarlı görüş sensörüdür. Ana işlemci, OmniVision 9665 CMOS kamera sensör modülüne bağlı Parallax P8X32A'dır (Pervane Çipi).
CMUcam4 renkleri izlemek veya temel görüntü istatistiklerini toplamak için kullanılabilir. En iyi performans, yüksek kontrastlı ve yoğun renkler olduğunda elde edilebilir. Örneğin, beyaz bir arka plandaki kırmızı bir topu kolayca izleyebilir, ancak değişen ışıkta farklı kahverengi tonları arasında ayrım yapmak zor olacaktır. Renkli nesneleri izlemek, yer işaretlerini yerelleştirmek, çizgileri takip etmek veya hareket eden işaretleri kovalamak için kullanılabilir. Renk istatistiklerini kullanarak, CMUcam4'ün bir sahneyi izlemesi, belirli bir rengi algılaması veya ilkel hareket algılaması yapması mümkündür. CMUcam4 köklü bir renk değişikliği algılarsa, sahnede bir şeyin değişmiş olma ihtimali vardır. "Çizgi modu"nu kullanarak, CMUcam4 renkli nesnelerin düşük çözünürlüklü ikili görüntülerini üretebilir. Bu, dal algılama ile çizgi takibi veya hatta basit şekil tanıma gibi daha karmaşık görüntü işleme yapmak için kullanılabilir. Bu daha gelişmiş işlemler, CMUcam4'ten gönderilen ikili görüntüleri sonradan işlemek için özel algoritmalar gerektirir. Normal bir dijital kamerada olduğu gibi, bu tür bir işleme bir bilgisayar veya en azından hızlı bir mikro denetleyici gerektirebilir.
CMUcam4 için en yaygın yapılandırma, standart bir TTL seri portu üzerinden bir ana işlemciyle iletişim kurmasıdır. Bu "ana işlemci" bir bilgisayar (USB veya RS232 aracılığıyla), Arduino, Basic Stamp, PIC veya benzeri bir mikrodenetleyici olabilir. CMUcam4, standart bir bilgisayar tabanlı görüş sisteminin boyutunu veya gücünü karşılayamayan gömülü sistemlere basit görüş eklemek için yeterince küçüktür. İletişim protokolü ve baud hızı, en yavaş işlemcileri bile barındıracak şekilde tasarlanmıştır. Daha da yavaş işlemciler için CMUcam4 "yoklama modunda" çalışabilir. Bu modda, ana işlemci CMUcam4'ten yalnızca tek bir veri paketi isteyebilir. Bu, daha yavaş işlemcilere verilerle daha kolay senkronize kalma yeteneği verir. "Gecikme modu" komutunu kullanarak bireysel seri veri karakterleri arasına bir gecikme eklemek de mümkündür. İletişim gecikmeleri nedeniyle, hem yoklama modu hem de gecikme modu bir saniyede işlenebilecek toplam kare sayısını düşürecektir.
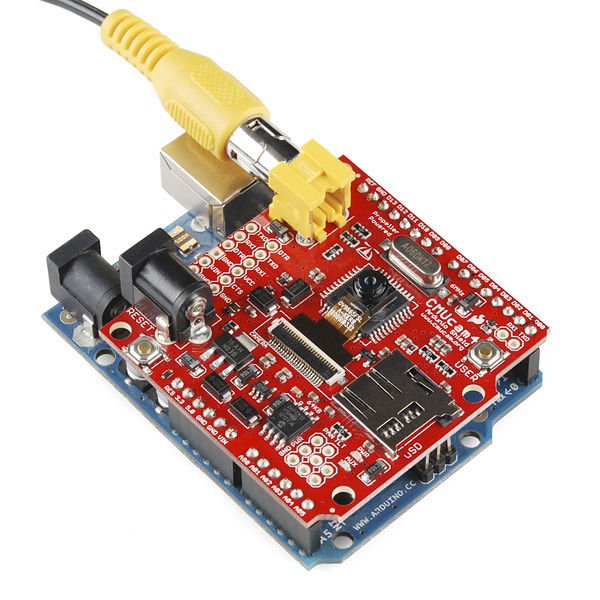
RCA ve barrel jakı doldurulmamış çünkü konektörler üniteyi bir muhafazaya monte ederken görüş alanını etkileyebilir. Ayrıca, servo güç veri yolu varsayılan durumunda bağlantısı kesilmiştir, Pan/Tilt servolarına güç sağlamak için kartın arka tarafındaki 'Servo EN' jumper'ını kapatmanız gerekecektir.
CMUcam shield bağlıyken Arduino'yu programlamak için ya 'HALT' özelliğini kullanmanız ya da seri jumper'ları (SJ4 ve SJ5) çıkarmanız, iki pinli başlığı (J1) herhangi bir dijital Arduino pinine bağlamanız ve ardından Arduino kurulumunda bulunan SoftwareSerial kütüphanesini kullanmanız gerekir.